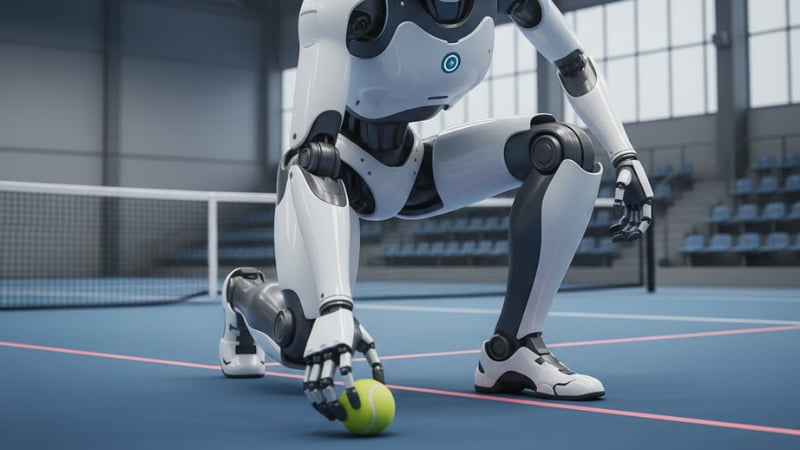
Un campo da tennis al coperto, illuminato da luci artificiali. Al centro della scena, un robot umanoide si muove con una fluidità quasi biologica. Una pallina da tennis gialla giace sul pavimento a pochi metri di distanza. Il robot, chiamato Oli, la individua con i suoi sensori, si avvicina con un’andatura stabile, piega le ginocchia in uno squat profondo – una manovra di equilibrio notoriamente complessa per una macchina bipede – e con una presa delicata la raccoglie. Si rialza, porta indietro il braccio e lancia la palla con un arco pulito. Dopo il lancio, non vacilla, non perde l’equilibrio. Si ferma, in una posa neutra, come se l’azione fosse la cosa più naturale del mondo.
Questo video, diffuso dalla società cinese LIMX Dynamics, potrebbe sembrare a un occhio inesperto una semplice dimostrazione di abilità. In realtà, rappresenta una pietra miliare nel campo della robotica. L’azione, eseguita in completa autonomia, senza controllo remoto né dati di motion capture pre-registrati, è la manifestazione di un concetto che costituisce il Sacro Graal della robotica umanoide: la “loco-manipolazione a corpo intero con percezione attiva”. Si tratta della capacità di un robot di integrare senza soluzione di continuità il movimento autonomo (locomozione) con l’interazione con gli oggetti (manipolazione), il tutto percependo e reagendo attivamente a un ambiente non pre-programmato.
La difficoltà di questa impresa è tale che persino i leader del settore raramente la mostrano. Chris Paxton, un ricercatore di intelligenza artificiale presso Agility Robotics, ha osservato che questo tipo di dimostrazione è “molto rara” tra gli umanoidi di punta, sottolineando come la capacità di “cambiare forma, adattarsi e muoversi” sia il vantaggio fondamentale del form factor umanoide rispetto ai robot su ruote. La scelta di una pallina da tennis è, in questo contesto, un colpo di genio comunicativo: un oggetto quotidiano che rende un’impresa ingegneristica estremamente complessa immediatamente comprensibile, ma che per gli addetti ai lavori svela un concentrato di sfide tecniche: riconoscimento di oggetti, pianificazione del percorso, stabilità dinamica, coordinazione di tutto il corpo per gestire il centro di massa durante lo squat e controllo motorio fine per la presa e il lancio. Quella di Oli non è una semplice prodezza; è una dichiarazione d’intenti sul futuro della robotica e sull’azienda che l’ha resa possibile.
LIMX Dynamics: La Visione di Shenzhen per l’Intelligenza Incarnata
Dietro al Robot Oli si cela LIMX Dynamics, una società di robotica con sede a Shenzhen che si definisce una “società di intelligenza incarnata” (Embodied Intelligence). La sua missione è straordinariamente ambiziosa: “sbloccare la generalizzazione dell’Intelligenza Artificiale Generale (AGI) nel mondo reale”. L’obiettivo non è semplicemente automatizzare compiti, ma creare una AGI che possa agire fisicamente nel nostro mondo. Questa visione si fonda su tre pilastri tecnologici fondamentali: la progettazione e produzione di hardware avanzato, il controllo del movimento basato sull’apprendimento per rinforzo (Reinforcement Learning) e lo sviluppo di nuovi paradigmi di addestramento per l’IA incarnata.
Fondata nel 2022, ma con radici in collaborazioni accademiche che risalgono al 2005, LIMX Dynamics si è rapidamente posizionata come un attore di primo piano nel panorama della robotica cinese e globale. Ha attirato finanziamenti significativi da giganti come Alibaba Group e JD.com, a testimonianza della fiducia del mercato nella sua visione e capacità tecnologica. L’azienda si inserisce perfettamente nella spinta strategica della Cina a diventare leader mondiale nell’intelligenza artificiale entro il 2030.
La strategia di LIMX va oltre la creazione di un singolo prodotto. L’azienda sta costruendo un intero ecosistema. I suoi prodotti sono esplicitamente rivolti a “Innovatori, Sviluppatori e Integratori di Sistemi (IDS)”. Questo approccio è evidente nella loro offerta: oltre a Oli, la gamma include il robot bipede modulare TRON 1, commercializzato come un “portale per la ricerca sull’RL umanoide”, e il versatile quadrupede a ruote W1, capace di passare dalla modalità a quattro ruote a quella bipede per superare ostacoli complessi.
Questa enfasi sulla comunità di sviluppo si traduce in un supporto software eccezionalmente aperto. Su piattaforme come GitHub, LIMX fornisce un’ampia gamma di strumenti: modelli di robot (URDF, USD), simulatori per MuJoCo e Gazebo, e framework di implementazione per Python, C++, ROS1 e ROS2. Offrendo hardware accessibile (Oli ha un prezzo di circa 22.000-30.000 dollari, competitivo per istituti di ricerca) e un ricco ecosistema software aperto, LIMX non sta solo vendendo robot; sta costruendo la piattaforma su cui la prossima generazione di ricercatori di robotica svilupperà il futuro dell’IA incarnata. È una strategia classica di costruzione di una piattaforma, simile a come NVIDIA con CUDA è diventata il fondamento del calcolo accelerato da GPU, con il potenziale di creare un effetto rete e accelerare l’innovazione in modo esponenziale.
Il Segreto dell’Apprendimento: Come il Reinforcement Learning Plasma la Mente del Robot Oli
La capacità di Oli di eseguire compiti complessi in autonomia non deriva da una programmazione manuale di ogni singolo movimento, un approccio che sarebbe fragile e impraticabile nel mondo reale. Il suo “cervello” è stato plasmato da una delle tecniche più potenti dell’intelligenza artificiale moderna: l’apprendimento per rinforzo, o Reinforcement Learning (RL).
L’RL è un paradigma di machine learning in cui un “agente” (in questo caso, il robot Oli) impara a prendere decisioni interagendo con un “ambiente” (il mondo fisico o una sua simulazione) attraverso un processo di tentativi ed errori. L’obiettivo dell’agente è massimizzare una “ricompensa” cumulativa. Il concetto è simile a come si addestra un cane: quando esegue l’azione corretta, riceve un premio (ricompensa positiva); altrimenti, non riceve nulla o riceve una penalità. Ripetendo questo ciclo milioni di volte, l’agente sviluppa autonomamente una “politica”, ovvero una strategia ottimale per agire in qualsiasi situazione data al fine di massimizzare le ricompense a lungo termine.
Per un robot come Oli, questo processo è fondamentale. Addestrare un robot fisico a camminare da zero sarebbe lento, costoso e pericoloso, poiché ogni caduta potrebbe danneggiare hardware del valore di decine di migliaia di dollari. Qui entra in gioco la sfida del Sim-to-Real, ovvero il trasferimento delle abilità apprese in una simulazione al mondo reale. Le simulazioni permettono di eseguire miliardi di tentativi in un ambiente virtuale sicuro e accelerato. Tuttavia, il divario tra la fisica perfetta di un simulatore e la caotica imprevedibilità del mondo reale (attrito, ritardi dei sensori, imperfezioni meccaniche) è un ostacolo enorme.
LIMX Dynamics affronta questa sfida con un approccio sistematico. Fornisce modelli di simulazione estremamente accurati (“Zero gap URDF for Sim2Real”) e garantisce la piena compatibilità con le principali piattaforme di simulazione come NVIDIA Isaac Sim, MuJoCo e Gazebo. Questo permette ai ricercatori di addestrare le complesse politiche di controllo di Oli in un ambiente virtuale, per poi implementarle sul robot fisico con un’alta probabilità di successo. Il successo di Oli non è quindi solo un trionfo dell’ingegneria meccanica, ma una testimonianza della maturità dell’RL come strategia di controllo praticabile per sistemi fisici complessi. Rappresenta un cambio di paradigma fondamentale: dall’ingegnerizzare meticolosamente una soluzione, al creare un sistema in grado di trovare da solo la soluzione migliore.
Robot Oli e l’Anatomia di un Miracolo: La Sfida Inerente alla Locomozione Bipede
Per apprezzare appieno la prodezza del Robot Oli, è essenziale comprendere perché la locomozione bipede sia una delle sfide più ardue della robotica. A differenza di un veicolo a quattro ruote o di un robot quadrupede, che godono di una base di appoggio intrinsecamente stabile, un robot bipede è fondamentalmente instabile. Camminare, per un umanoide, è stato descritto come “uno stato costante di caduta controllata”. Ogni passo è un atto di recupero da uno squilibrio imminente, una danza delicata tra la perdita e il ripristino dell’equilibrio.
Questa sfida si traduce in una complessità ingegneristica e computazionale immensa. Richiede un controllo in tempo reale del centro di massa del robot, la gestione della quantità di moto e la coordinazione precisa di decine di articolazioni, ognuna con più gradi di libertà (DOF), come le anche, le ginocchia e le caviglie. Ogni passo è una “cacofonia di cinematica inversa, ottimizzazione della traiettoria delle articolazioni e distribuzione della forza” che deve essere risolta in frazioni di secondo. A questo si aggiunge la necessità di adattarsi a terreni imperfetti e a perturbazioni esterne, il che richiede un flusso costante di dati da sensori multimodali e algoritmi capaci di reagire istantaneamente.
Allora, perché insistere su un design così intrinsecamente difficile? La risposta non risiede nella semplice emulazione della forma umana, ma in una scelta profondamente pragmatica e strategica. Il mondo in cui viviamo – con le sue scale, i suoi corridoi, i suoi strumenti e le sue postazioni di lavoro – è stato progettato da e per gli esseri umani. Un robot umanoide è, per sua natura, “pronto per l’infrastruttura”. A differenza dell’automazione specializzata che spesso richiede costose modifiche all’ambiente di lavoro (scaffalature personalizzate, zone dedicate), un umanoide può teoricamente essere inserito (“drop-in”) in un magazzino, una fabbrica o una casa esistente con modifiche minime o nulle. Questa compatibilità universale con il mondo costruito dall’uomo è il premio finale che giustifica la fatica di superare la sfida della stabilità bipede. La capacità di Oli di attraversare un pavimento e interagire con un oggetto è un passo fondamentale verso questa visione ultima di un robot per scopi generali.
La Corsa agli Umanoidi: Robot Oli a Confronto con i Giganti del Settore
LIMX Oli non entra in scena in un vuoto, ma in un’arena sempre più affollata e competitiva, una vera e propria “corsa allo spazio” per la robotica umanoide. Ogni contendente porta con sé una filosofia, punti di forza e un focus di mercato unici.
- Boston Dynamics Atlas: Da anni il punto di riferimento per l’agilità dinamica. Famoso per i suoi video di parkour e salti mortali, Atlas è una piattaforma di ricerca e sviluppo pura, progettata per esplorare “la frontiera di ciò che è fisicamente possibile”. La sua recente transizione da un sistema idraulico a uno completamente elettrico promette una forza e un’agilità ancora maggiori.
- Agility Robotics Digit: Il leader indiscusso nell’implementazione commerciale. Con un design ottimizzato per la logistica, Digit è progettato per lavorare al fianco degli esseri umani nei magazzini, svolgendo “compiti noiosi e ripetitivi” come la movimentazione di contenitori. Le partnership strategiche con colossi come Amazon e GXO Logistics ne testimoniano la maturità e l’adozione nel mondo reale.
- Apptronik Apollo: Progettato fin dall’inizio per la producibilità in serie e la collaborazione sicura con l’uomo in fabbriche e magazzini. I suoi punti di forza sono un’architettura modulare e un’elevata capacità di carico utile (25 kg), che lo rendono ideale per compiti di sollevamento.
- Unitree H1: Commercializzato come il robot umanoide più veloce al mondo, l’H1 punta tutto sulla mobilità estrema. Come Oli, è posizionato come una potente piattaforma per la ricerca e lo sviluppo, dotato di sensori avanzati come il LiDAR 3D per una percezione a 360 gradi.
In questo panorama, Oli si ritaglia una nicchia strategica. Non cerca di battere Atlas nell’agilità acrobatica o l’H1 nella velocità pura, né ha ancora le partnership commerciali di Digit. Il suo punto di forza risiede nel suo equilibrio: è una piattaforma general-purpose altamente capace, che combina una sofisticata loco-manipolazione autonoma con un ecosistema di sviluppo aperto e accessibile, posizionandosi come il catalizzatore ideale per la ricerca e l’innovazione nel campo dell’IA incarnata.
I Titani della Robotica: Un Confronto tra Umanoidi
| Caratteristica | LimX Dynamics Oli | Boston Dynamics Atlas (Elettrico) | Agility Robotics Digit | Apptronik Apollo | Unitree H1 |
| Sviluppatore | LIMX Dynamics | Boston Dynamics | Agility Robotics | Apptronik | Unitree |
| Altezza | 1.65 m | ~1.5 m | ~1.75 m | 1.73 m | 1.80 m |
| Peso | 55 kg | 85 kg | N/D | 72.6 kg | 47 kg |
| Carico Utile | 3 kg (per braccio) | N/D | 16 kg | 25 kg | ~7 kg (nominale) |
| Gradi di Libertà | 31+ | 20+ | N/D | N/D | 19-27 |
| Focus Primario | Piattaforma R&S, Loco-manipolazione General-Purpose | R&S, Agilità Dinamica Estrema | Logistica, Movimentazione Materiali | Manifattura, Logistica Collaborativa | R&S, Mobilità ad Alta Velocità |
| Punto di Forza | Ecosistema Sviluppatori, Loco-manipolazione Autonoma | Agilità e Dinamismo Ineguagliati | Pronto per il Lavoro, Partnership Commerciali | Alto Carico Utile, Sicurezza Collaborativa | Velocità di Corsa Record |
Oltre il Campo da Tennis: I Futuri Scenari Applicativi
La dimostrazione di Oli è solo un assaggio del potenziale. L’obiettivo finale dei robot umanoidi general-purpose è operare in una vasta gamma di scenari, ben oltre i confini del laboratorio. L’industria sta convergendo su una chiara strategia di implementazione graduale, che parte da ambienti strutturati per arrivare a quelli più complessi e imprevedibili.
- Logistica e Magazzini: Questo è il “mercato di approdo” (beachhead market) per gli umanoidi. In questi ambienti semi-strutturati, i robot possono affinare le loro abilità in compiti come picking, packing, stoccaggio e pallettizzazione. Possono affrontare la carenza di manodopera, ridurre gli infortuni sul lavoro e liberare gli esseri umani da compiti ripetitivi e usuranti. Il magazzino non è solo il primo mercato, ma il “crogiolo” in cui gli umanoidi accumuleranno milioni di ore di dati operativi, perfezionando gli algoritmi che un giorno serviranno in scenari molto più complessi.
- Soccorso e Sicurezza Pubblica: I robot con gambe, sia bipedi che quadrupedi, possiedono la capacità unica di navigare su terreni impervi dove veicoli e persone non possono arrivare, come le macerie di un terremoto o edifici crollati. Possono condurre missioni di ricognizione, consegnare forniture mediche essenziali e valutare la stabilità strutturale, aumentando drasticamente la sicurezza dei soccorritori umani.
- Assistenza agli Anziani e Domestica: Questa è la visione a lungo termine. In un mondo con una popolazione sempre più anziana, gli umanoidi potrebbero fornire un supporto cruciale: assistenza nelle attività quotidiane, promemoria per i farmaci, aiuto nella mobilità e, non meno importante, compagnia per combattere la solitudine.
- Ispezione Industriale e Manifattura: Robot come Oli possono eseguire ispezioni in ambienti pericolosi, come le acciaierie (un compito già testato dal prototipo X1 di LIMX), o asservire macchinari in una linea di produzione, lavorando in sinergia con gli operai umani.
Conclusione: Un Piccolo Gesto per un Robot, un Futuro Riscritto per l’Umanità
Torniamo all’immagine iniziale: Oli che raccoglie una pallina da tennis. Quel gesto, così semplice e fluido, è molto più di una dimostrazione tecnica. È un potente simbolo di convergenza, il punto in cui hardware meccanico avanzato, software di controllo in tempo reale e intelligenza artificiale auto-apprendente si fondono in un’unica, capace entità.
La nascita di Oli e i progressi dei suoi competitor segnano un punto di svolta. Dimostrano la validità della visione strategica di aziende come LIMX Dynamics, focalizzata sulla creazione di ecosistemi aperti per accelerare la ricerca. Sottolineano il potere trasformativo del Reinforcement Learning, che sta spostando la robotica da un dominio di programmazione deterministica a uno di comportamento emergente. E infine, confermano la logica pragmatica dietro la difficile ricerca del form factor umanoide: creare macchine che possano integrarsi nel nostro mondo, non costringerci a ricostruire il mondo per loro.
Le sfide rimangono immense: l’autonomia delle batterie, i costi di produzione su larga scala e, soprattutto, la garanzia di una sicurezza assoluta nell’interazione con gli esseri umani sono ostacoli ancora da superare completamente. Tuttavia, il ritmo del progresso è innegabile. Stiamo assistendo ai passi fondamentali verso un futuro in cui robot general-purpose come Oli non saranno più confinati nei laboratori o in video dimostrativi, ma si integreranno nelle nostre fabbriche, nelle nostre case e nelle nostre vite, non come semplici strumenti, ma come collaboratori capaci, pronti a ridefinire la natura stessa del lavoro e a espandere il potenziale umano.